Koncepcja
Instalacja Mechaniczne związki (2016) powstała we spółpracy z Mariuszem Frontem, który stworzył jej pierwotną wersję w 2000 roku. Z chęci poszerzenia
realizacji jako nie korzystającej jedynie z czysto mechanicznych rozwiązań w
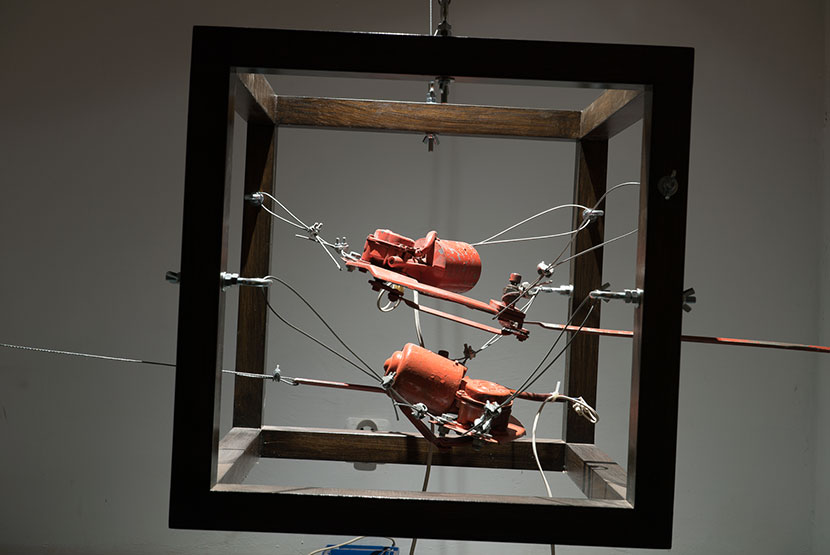
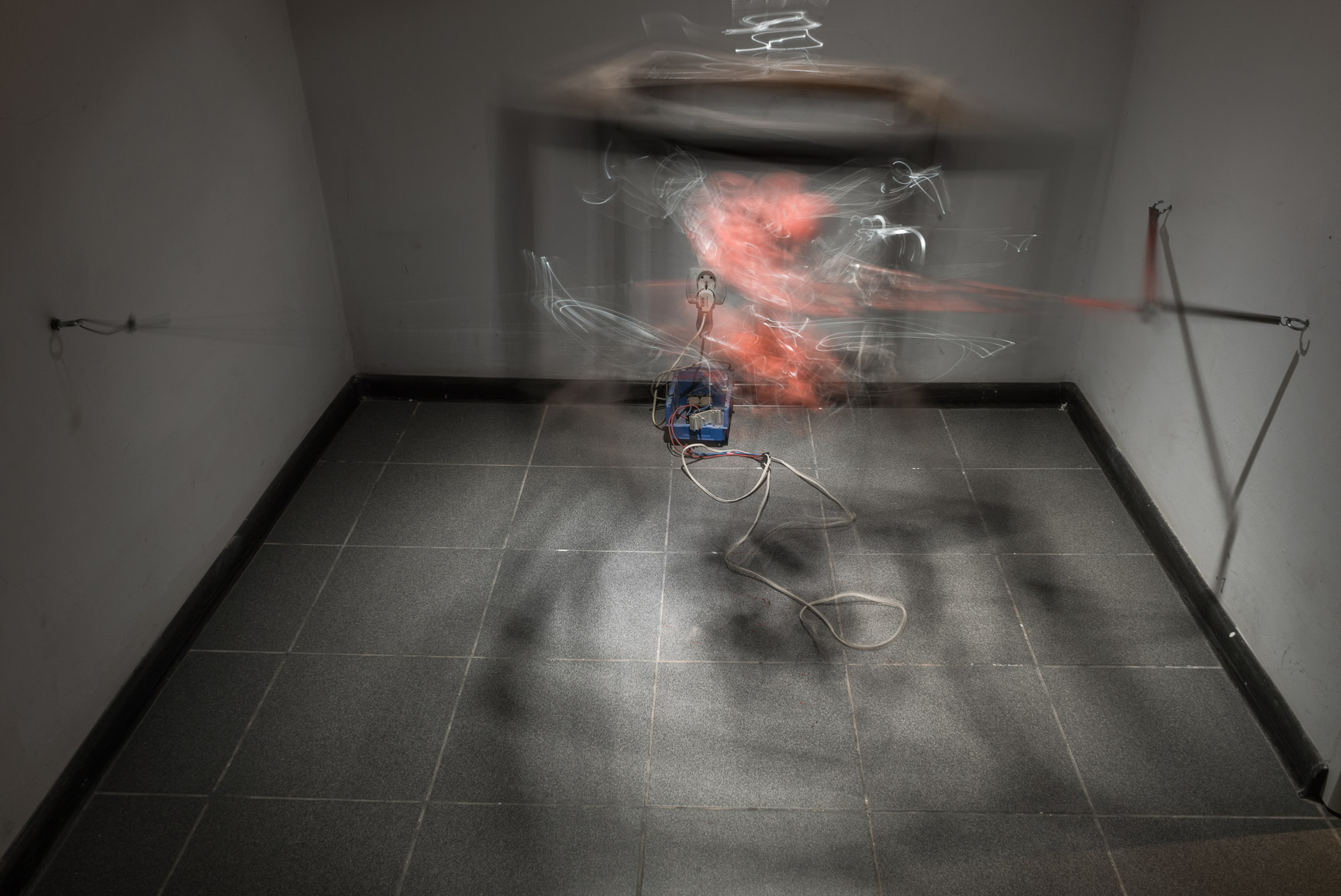
jej drugą wersję wprowadzone zostały technologie oparte o programowanie układów elektronicznych, skrypty i sensory odpowiedzialne za zbieranie danych. Mechaniczne związki to instalacja składająca się z sześciu obiektów mechanicznych – mobilnych, obiektu spełniającego funkcję swoistej camera obscura, zapisującej fazy ruchu oraz przestrzeni odzwierciedlającej za pomocą dźwięku procesy kinestetyczne zachodzące w sferze instalacji. Ich działania sprzęgają się, tworząc pewne sekwencje ruchów. Przez pewien czas urządzenia współpracują ze sobą dość płynnie i neutralnie, by następnie wejść w interakcję między sobą. Gubią wspólny rytm i zaczynają „walczyć” ze sobą, przeciągać się, rozhuśtywać.

Przetwarzanie danych z otoczenia
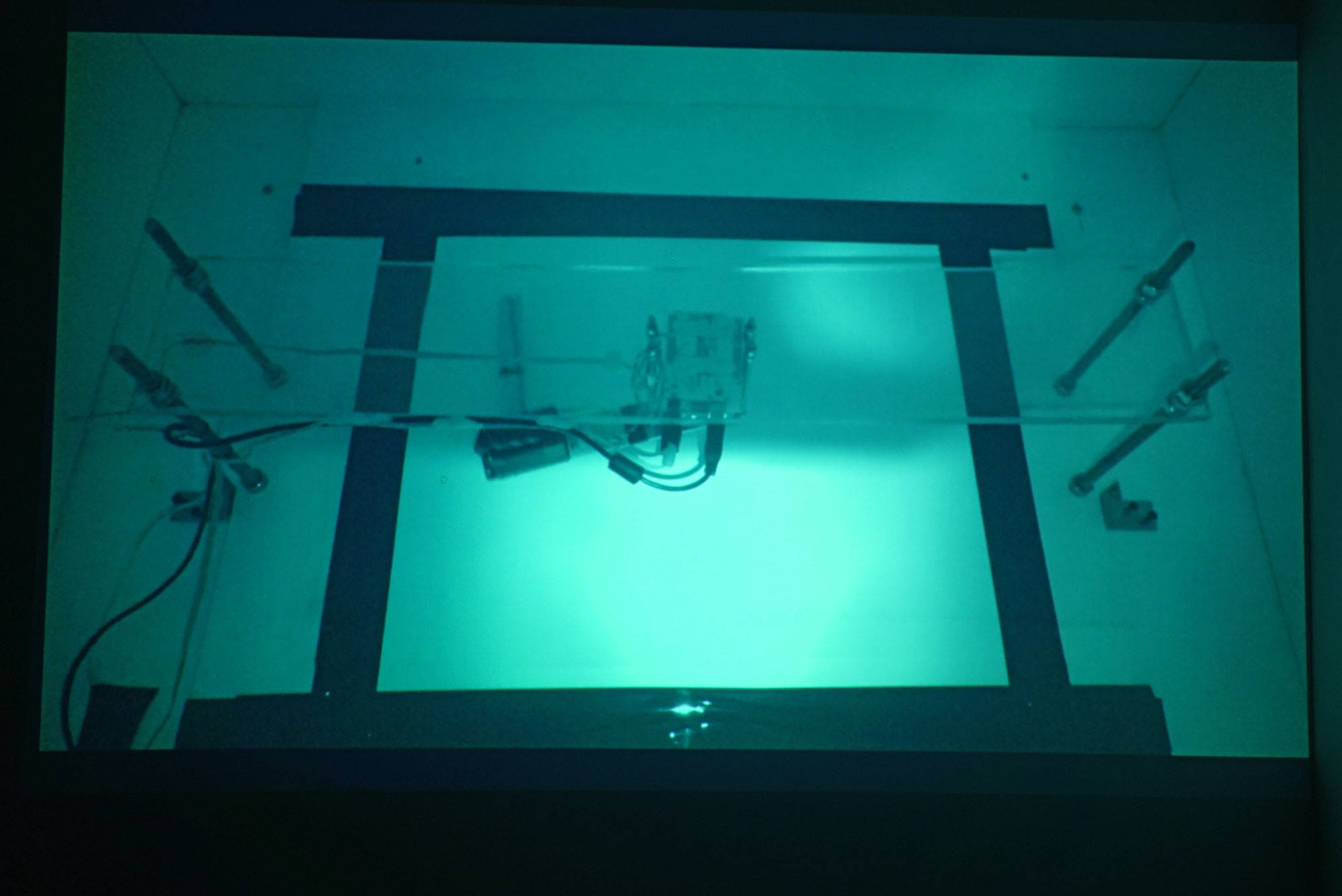
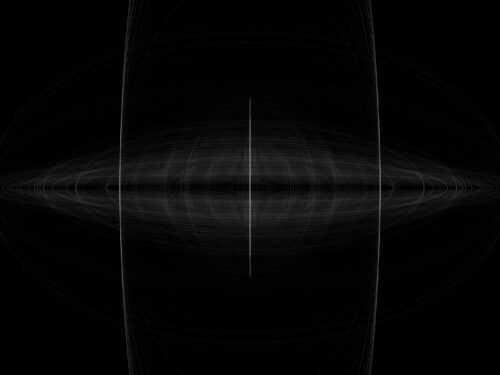
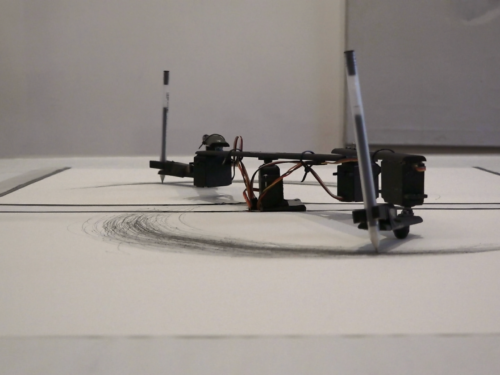
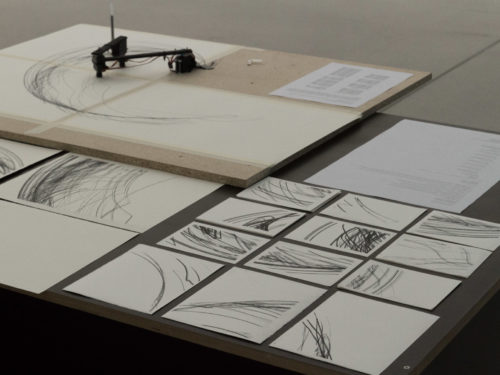
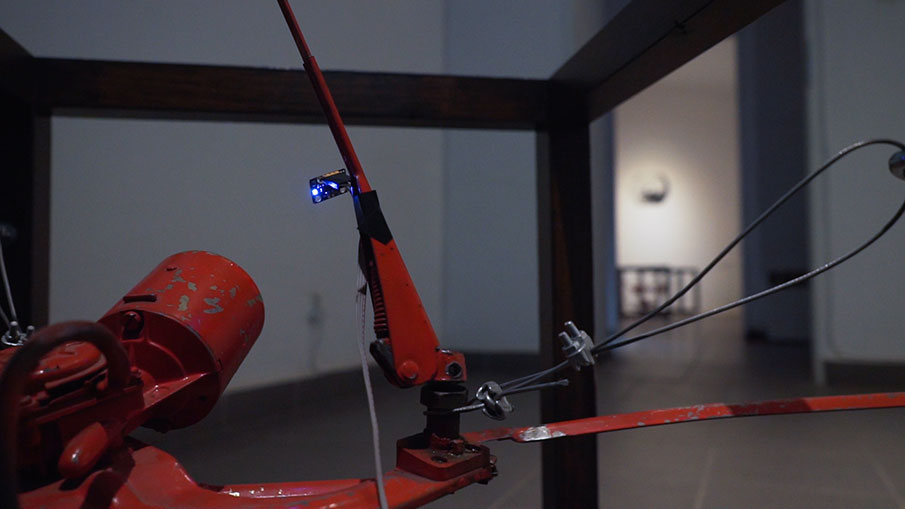
Na każdym mobilu umieszczony jest niewielki układ elektroniczny odpowiedzialny za zbieranie bodźców ruchowych. Sygnały te zostają przesłane do czarnego, zamkniętego sześcianu skrywającego w sobie programowalny moduł odpowiedzialny za zczytywanie i przetwarzanie danych oraz stanowisko z ruchomym ramieniem niewielkiego robota, operującym nad rozpiętym materiałem światłoczułym. Spływające dane o ruchach wykonywanych przez silniki, ich zakresie, sile, wychyleniu, rejestrowane są przez program i kolejno przekazywane do ramienia, które naświetla papier światłoczuły. Materiał po określonym czasie może zostać wyciągnięty i wywołany. Obraz, który się ukaże jest przetworzeniem widzialnego ruchu mobili w jego zapis w formie naświetlonego śladu wykonanego przez mechanizm. Jest to światłoczuły szkic systemu elementarnego, stworzonego jako instalacja mobilna, odkodowujący jego działanie. Z wnętrza sześcianu przekazywany jest też w podczerwieni obraz z kamery.
Mechaniczne związki to nie tylko ukazanie wprost, jak uruchomione mechanizmy działają na siebie. Instalacja podejmuje próbę pokazania, że związki takie przekładają się na działanie i odbiór złożonego środowiska. Dostarczając narzędzi do kodowania i dekodowania informacji, możemy zmieniać zmysły, przez które zostaje odebrana, a tym samym częściowo jej postrzeganie i znaczenie. Metody analogowe i proste urządzenia tej instalacji są początkiem informacji. W procesie pracy zostaje ona przesłana przez media cyfrowe i przetwarzana za pomocą bardziej skomplikowanych i zaawansowanych technicznie narzędzi. Metoda odkodowanie informacji na powrót stwarza ją czytelną dla odbiorcy bez użycia tych technicznych pośrednictw. Ruch przechodzi wewnętrzną przemianę w instalacji aby na powrót stać się informacją zapisaną w obrazie i dźwięku. Instalację Mechaniczne związki można też porównać do procesu badań medycznych organizmu. Tutaj zamiast ciała, oglądowi poddany zostaje mechaniczny organizm. Po przyczepieniu do niego czujników, sensorów czy mikrofonów mamy wgląd w procesy jego pracy. Żywotność ta podlega diagnozie z pomocą zapisu fotograficznego mogącego kojarzyć się z rentgenowskim i dźwięków, które w procedurach medycznych stosowane są do odczytu parametrów życiowych organizmów. Mechaniczne związki stanowią zatem modelem systemu, który relacje pomiędzy człowiekiem a wytworzonym sztucznie środowiskiem stara się tłumaczyć poprzez rejestrację i odczytanie zjawisk dostępnych dla dwóch stron tego układu.
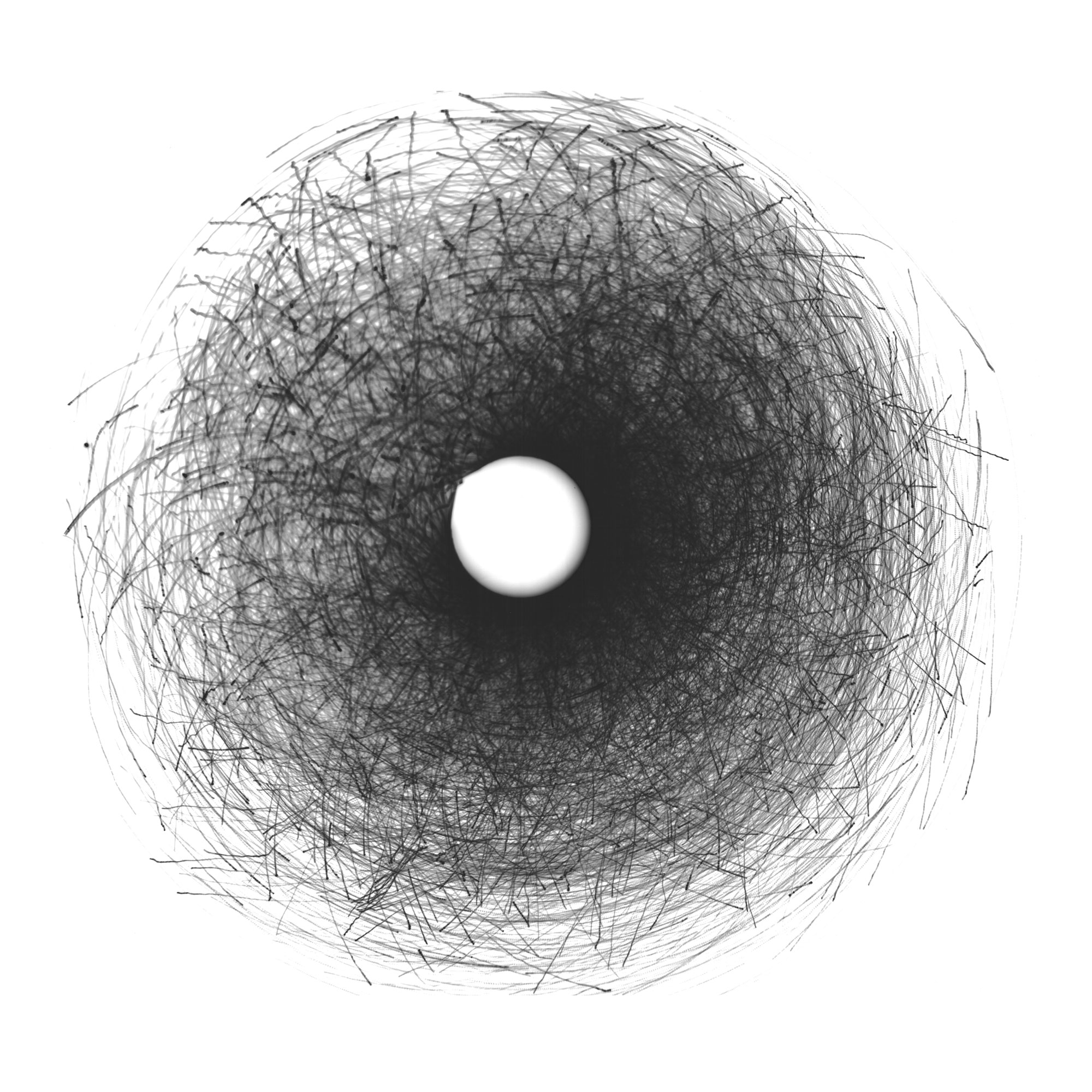
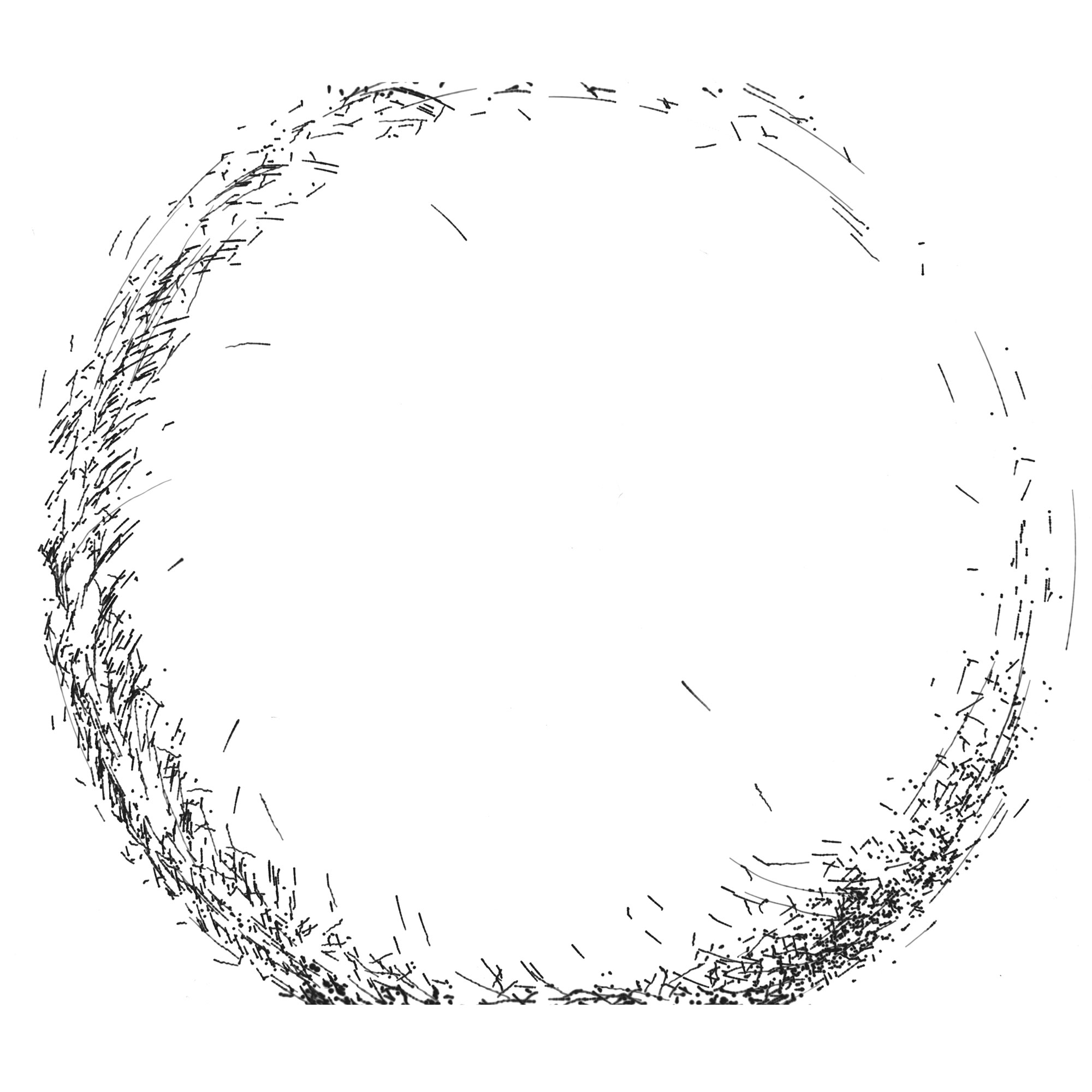
Seria powstałych obrazów jest końcowym zapisem sekwencji ruchów mobilnych obiektów. Zapis ten odzwierciedla, porządkuje je i stwarza czytelnymi. Nie jest ornamentem, lecz stara się obrazować występujące prawidłowości i logikę ruchu obiektów, które są trudne do wychwycenia podczas obserwacji instalacji. Jest to światłoczuły szkic systemu elementarnego, stworzonego jako instalacja mobilna, odkodowujący jego działanie. Odczytaniu systemu pomaga posiadanie pewnych narzędzi dekodujących znaczenia. W instalacji technologia i prawa rządzące systemem mechanicznym i elektronicznym tłumaczone zostają na język wizualny dostępny zmysłom odbiorcy. Z wnętrza sześcianu przekazywany jest też w podczerwieni obraz z kamery. W przeciwieństwie do sześciu mobili, których ruch jest możliwy do obserwacji bezpośredniej, ramię jest ukryte w szczelnym boksie, gdzie zapisuje ruch jak w ciemni fotograficznej. Oglądanie tego procesu umożliwia jedynie transmisja i projekcja na zewnątrz.
Media i rok powstania
Ramię robota, czujnik żyroskopowy, silniki od wycieraczek samochodowych, układ elektroniczny, papier fotograficzny, projekcja video, drewno, aluminium, pleksi (2016)
Zespół i wsparcie
Patrycja Maksylewicz – koncepcja, programowanie, ramię robota
Mariusz Front – koncepcja, ruchome sześciany
Przemysław Koleszka – wsparcie techniczne
Wystawy
2022 Terytoria fotografii w ramach 3. Krakowskich Spotkań Artystycznych – Terytoria, Związek Polskich Artystów Plastyków Okręg Krakowski oraz Nowohuckie Centrum Kultury, Kraków, Polska
2018 Singularity Now ADAF Festival, Megaron The Athens Concert Hall, Grecja Ateny
2018 ARTBOTY Digital Art Festival Patchlab, Małopolski Ogród Sztuki, Kraków, Polska
2017 Wzgórze Krzemowe, Budynek Ośrodka TVP Kraków, Polska
2017 BinaryConflict ArsTechne Festival, Tytano, Kraków, Polska
2016 Ty / Ja – Związki mechaniczne, Galeria Opcja, Kraków, Polska