Koncepcja
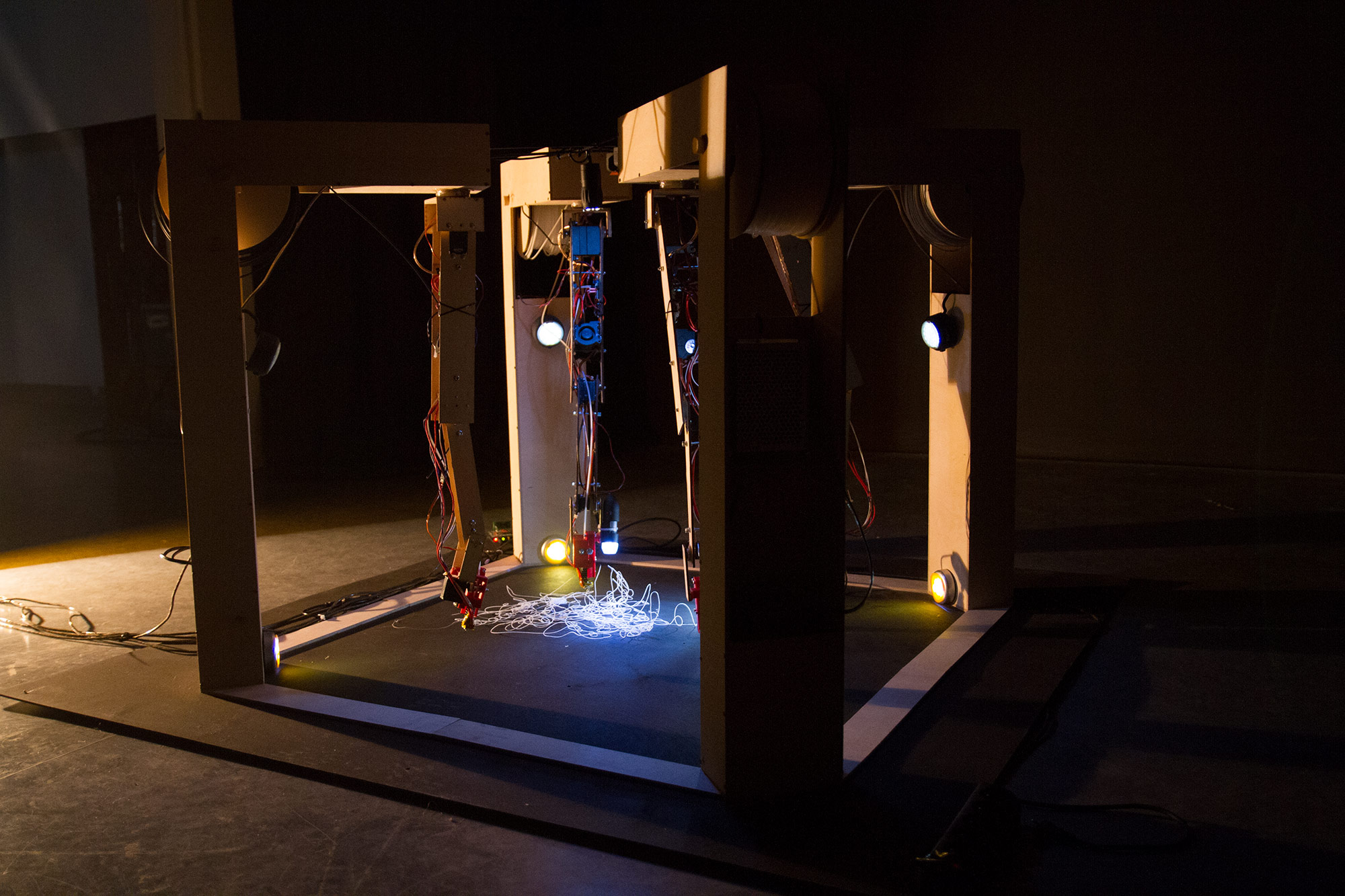
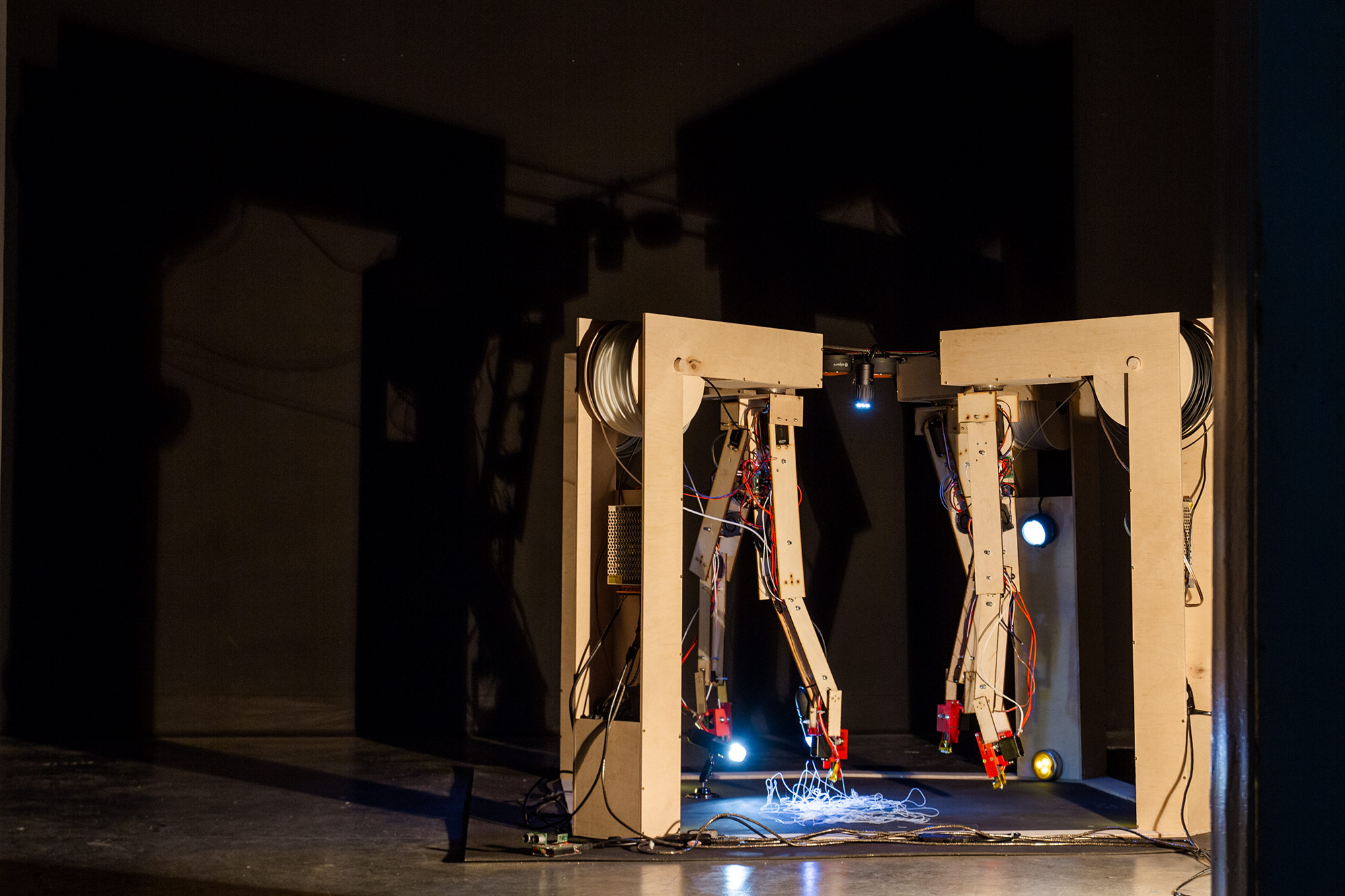
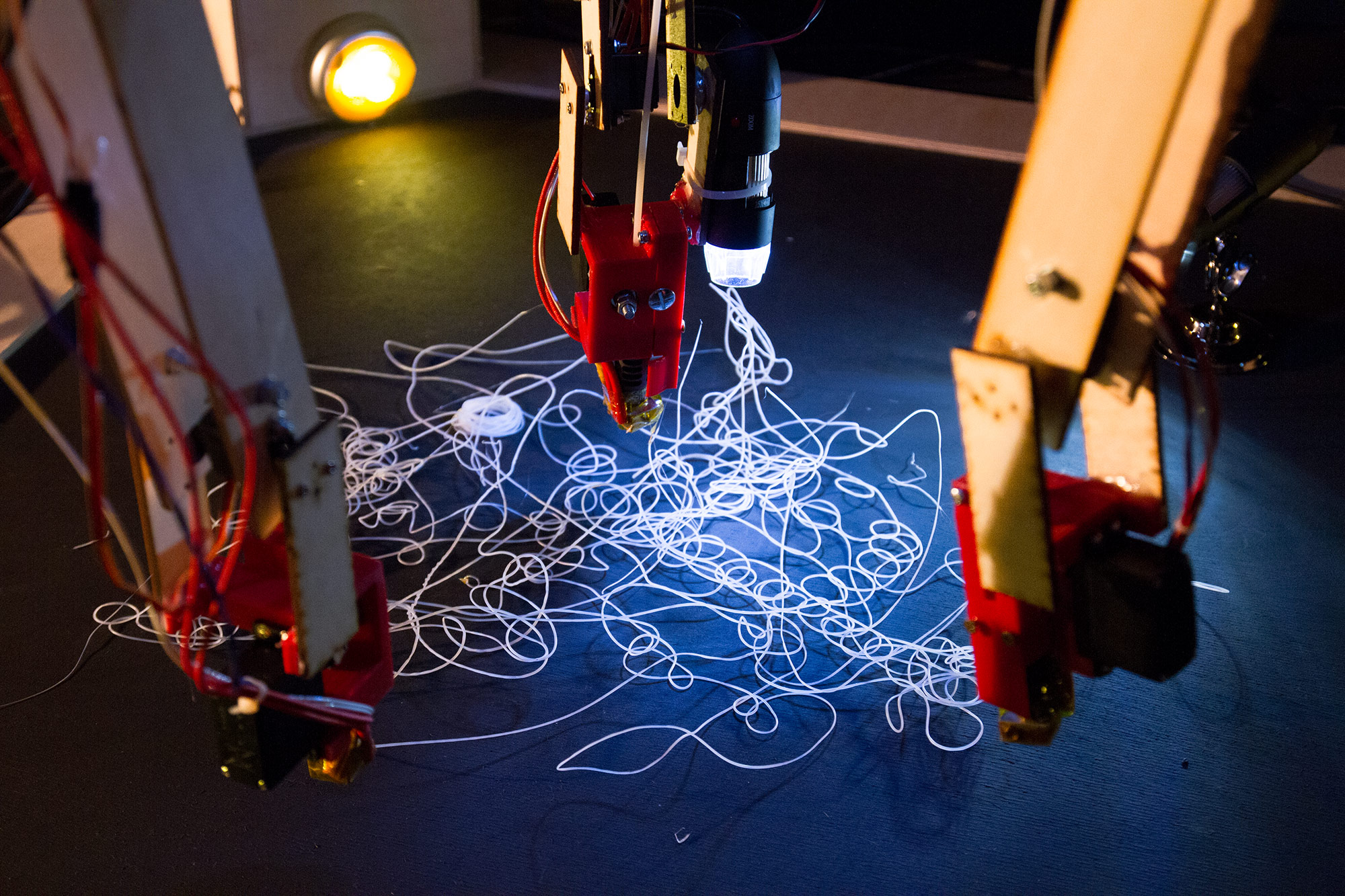
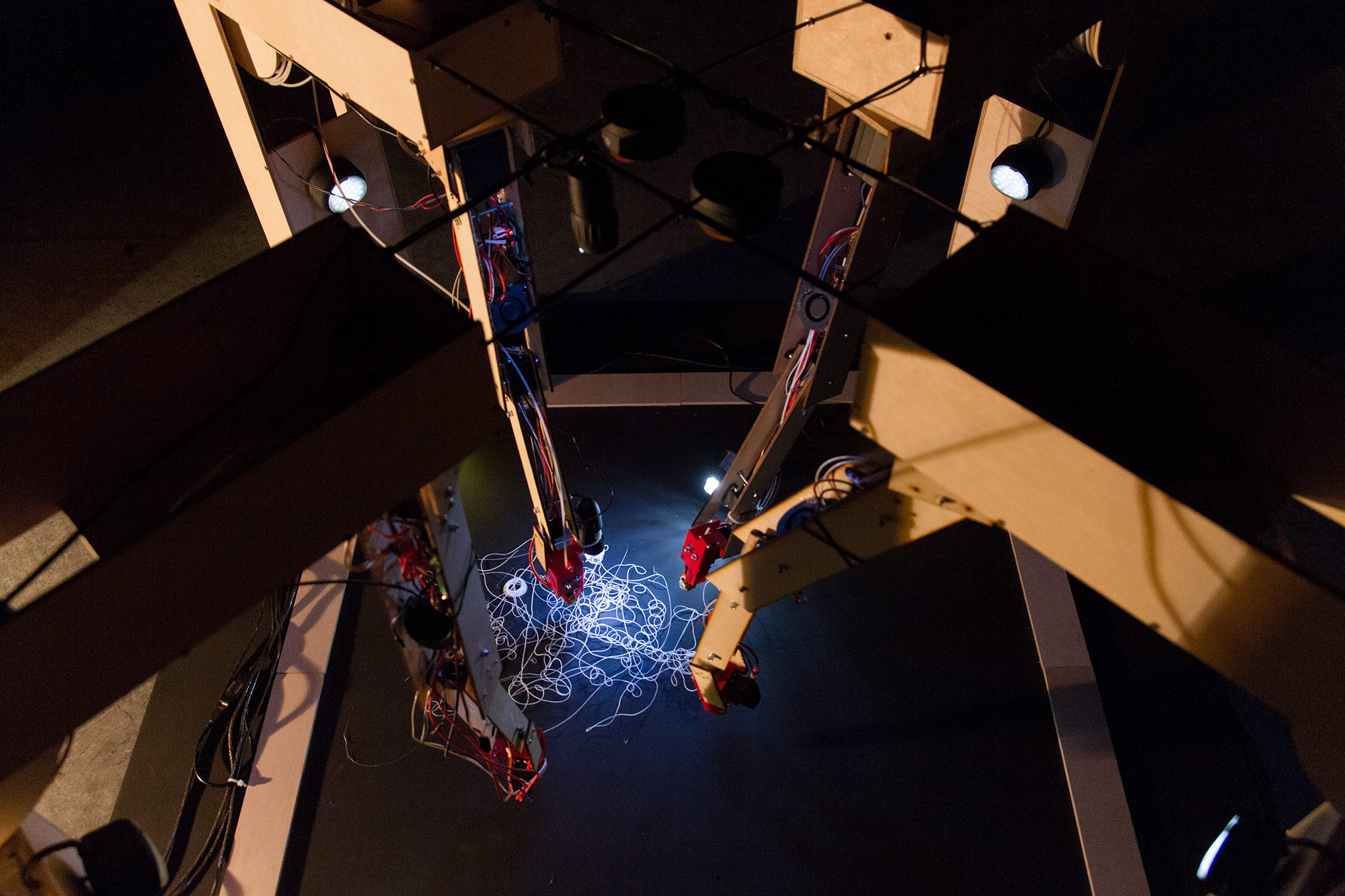
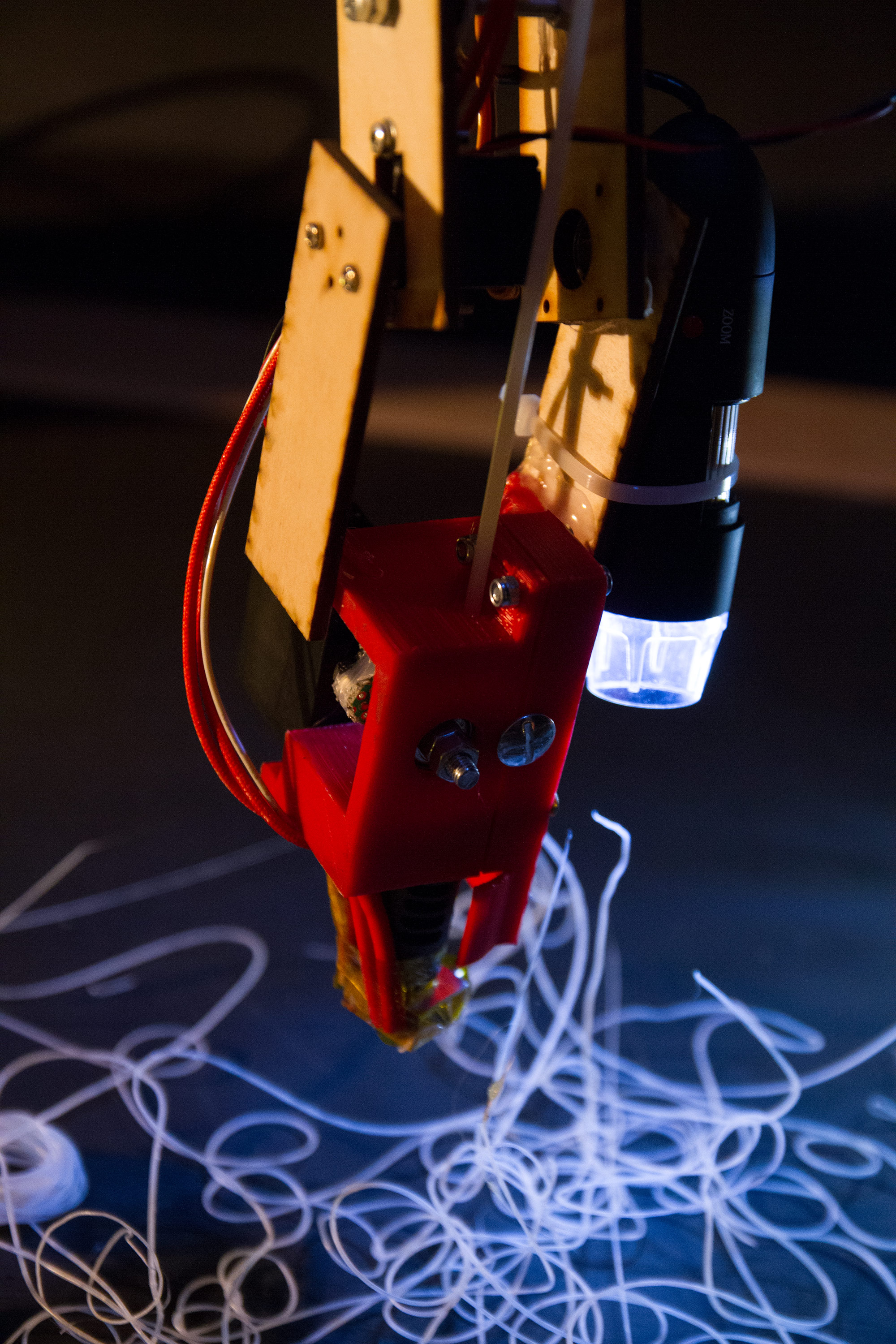
Instalacja Kreska (2014) to magisterska praca dyplomowa obroniona na Wydziale Intermediów Akademii Sztuk Pięknych w Krakowie, na kierunku Intermedia w Pracowni Sztuki Performance prof. Artura Tajbera z dodatkową opieką Katedry Obszarów Sztuki prof. ASP, dr hab. Grzegorza Bilińskiego oraz prof. Marka Chołoniewskiego. Artystyczna część pracy do instalacja stworzona do budowania obiektu rysunkowego poprzez analizę przestrzeni. Monitoruje ona otoczenie i przetwarza dane na instrukcje sterujące grupą czterech mechanicznych rysujących ramion. Dane z odczytu interpretowane są na linie utrwalane w przestrzeni przy użyciu technologii druku 3D. Cały proces działania instalacji oparty jest o idee technologicznego zapośredniczenia tradycyjnego procesu rysowania. Dane wejściowe pochodzą z przestrzeni, w której jest zainstalowana oraz od odbiorcy traktowanego w tej sytuacji jak pozujący model. Dane te są przetwarzane przez reguły (algorytmy). Efektem tego przetworzenia jest wykonanie przez ramiona obiektu rysunkowego, zbudowanego w technice druku 3D, jako wyniku 24 godzinnego procesu. To abstrakcyjny, przestrzenny zapis doby (pejzaż) oraz zapis parametrów człowieka (quasi-akt). Parametry i ruch człowieka oraz warunki atmosferyczne (zewnętrzne) jak i te w pomieszczeniu (wewnętrzne) sterują procesem.
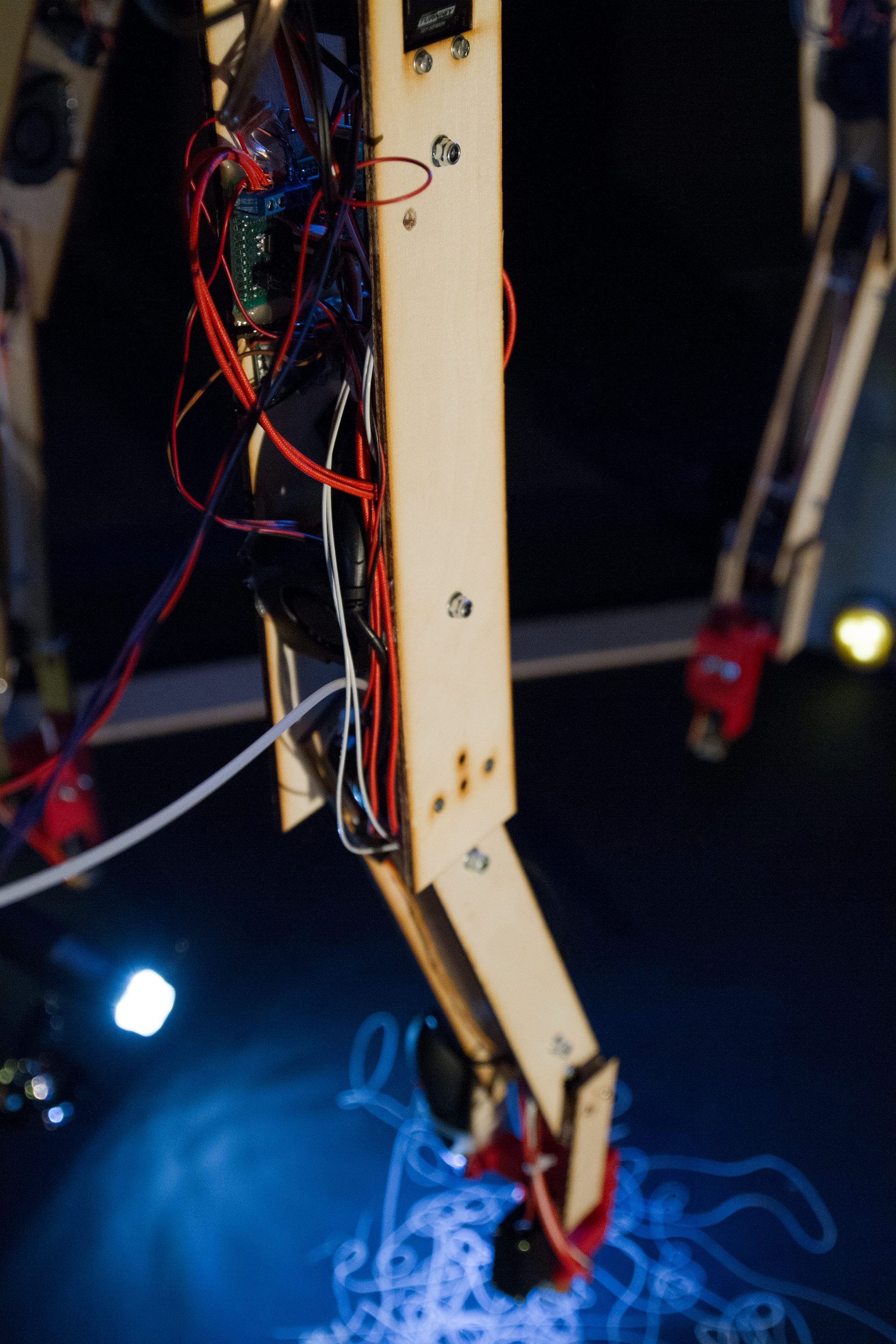
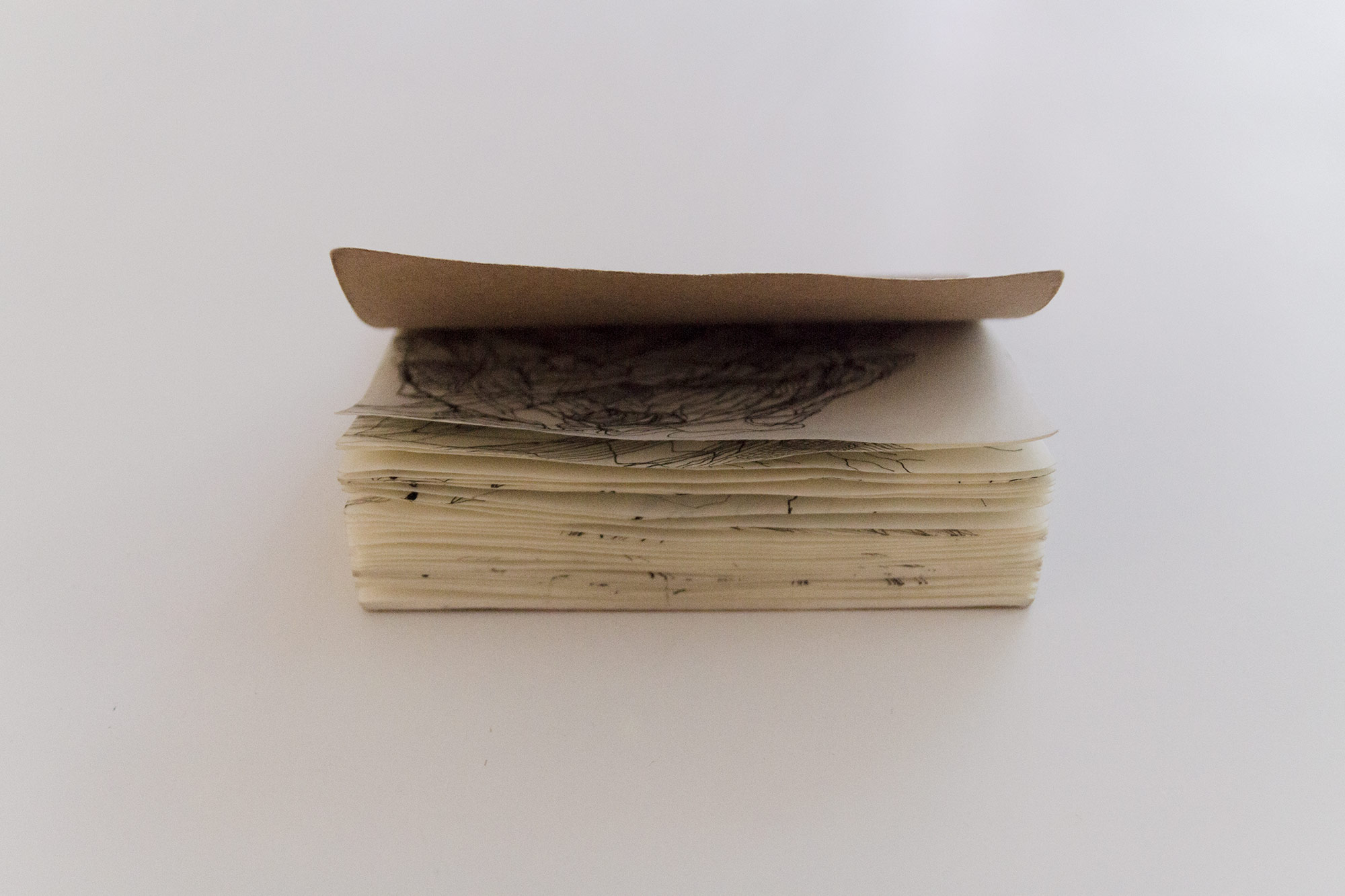
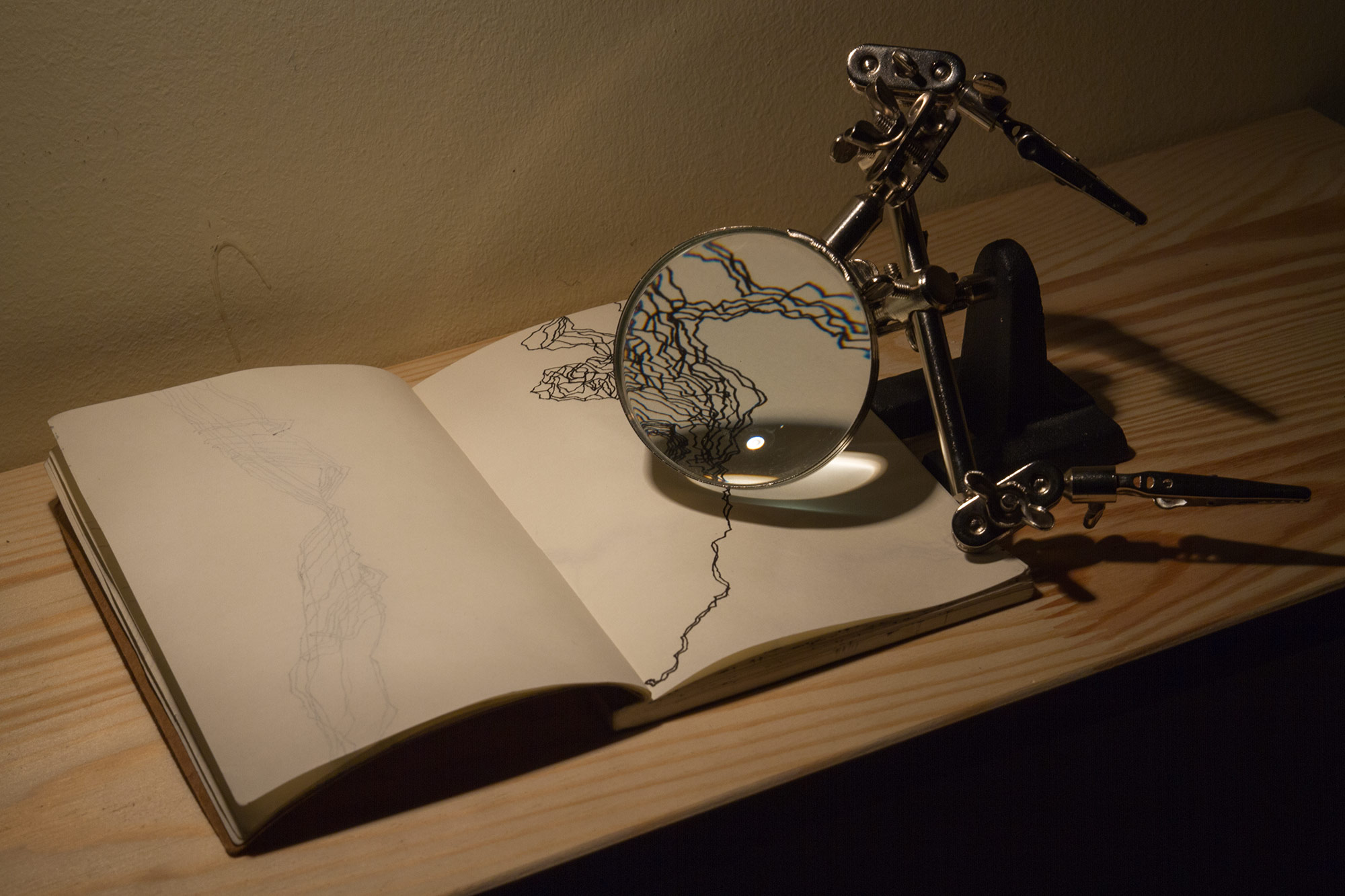
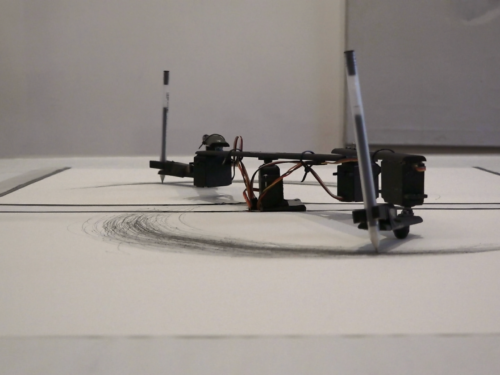
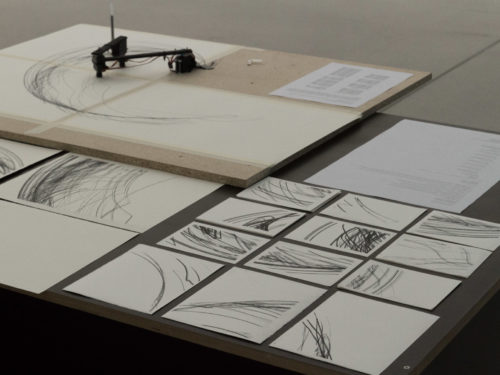
Seria powstałych obrazów jest końcowym zapisem sekwencji ruchów mobilnych obiektów. Zapis ten odzwierciedla, porządkuje je i stwarza czytelnymi. Nie jest ornamentem, lecz stara się obrazować występujące prawidłowości i logikę ruchu obiektów, które są trudne do wychwycenia podczas obserwacji instalacji. Jest to światłoczuły szkic systemu elementarnego, stworzonego jako instalacja mobilna, odkodowujący jego działanie. Odczytaniu systemu pomaga posiadanie pewnych narzędzi dekodujących znaczenia. W instalacji technologia i prawa rządzące systemem mechanicznym i elektronicznym tłumaczone zostają na język wizualny dostępny zmysłom odbiorcy. Z wnętrza sześcianu przekazywany jest też w podczerwieni obraz z kamery. W przeciwieństwie do sześciu mobili, których ruch jest możliwy do obserwacji bezpośredniej, ramię jest ukryte w szczelnym boksie, gdzie zapisuje ruch jak w ciemni fotograficznej. Oglądanie tego procesu umożliwia jedynie transmisja i projekcja na zewnątrz.

Media i rok powstania
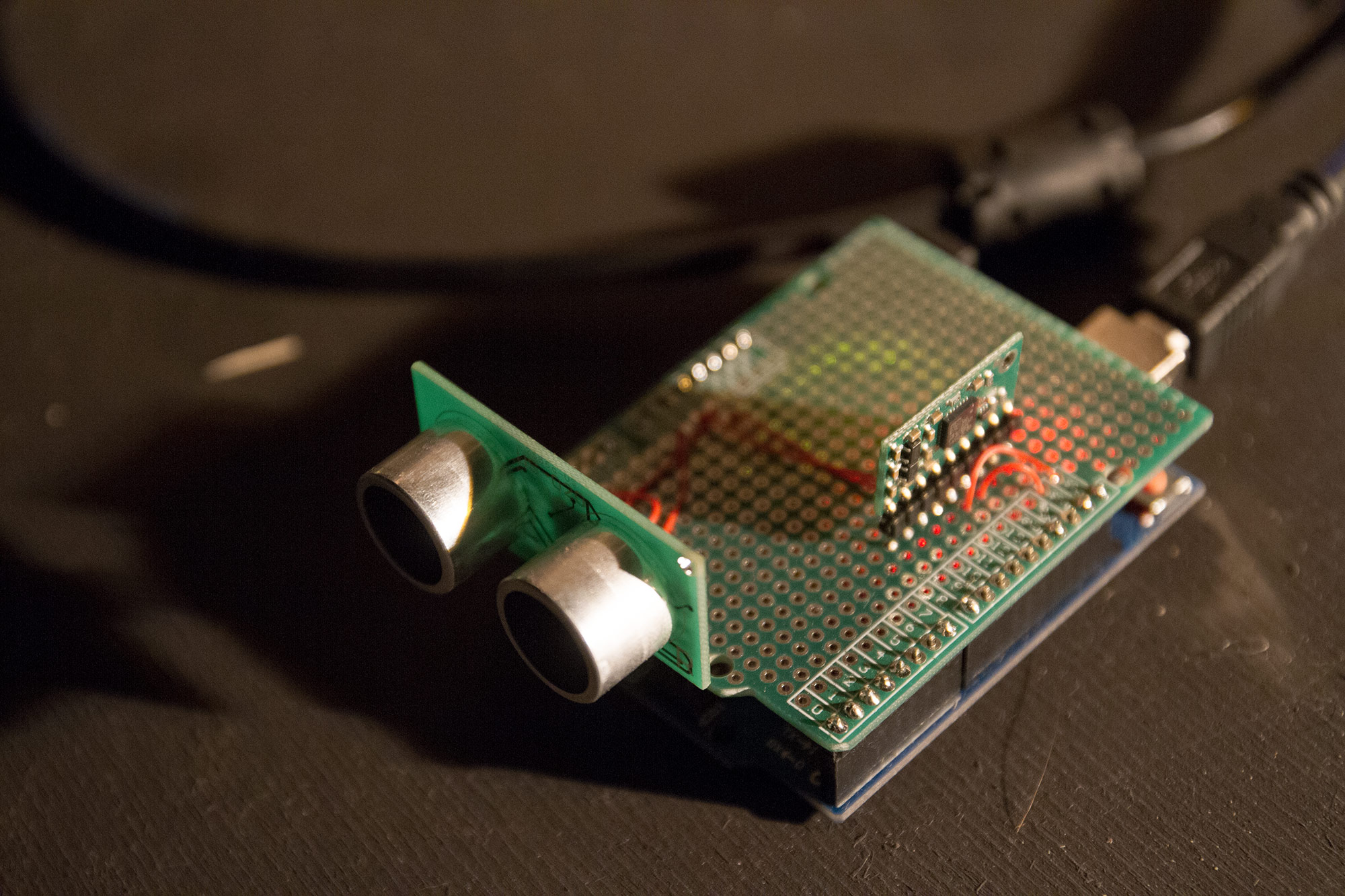
Ramiona robotów, czujnik warunków atmosferycznych i odległości, układ elektroniczne sterujace serwomechanizmami, filament, technologia druku 3D, wideo real-time (streaming), drewno, aluminium, pleksi (2014)
Zespół i wsparcie
Patrycja Maksylewicz – koncepcja, realizacja techniczna
Piotr Nowicki – programowanie, realizacja techniczna
Agnieszka Jakubiak – wsparcie logistyczne
Łukasz Furman – mapping, wsparcie techniczne
Przemysław Podolski – wsparcie techniczne
Wystawy
2014 Kreska, Wydział Intermediów ASP w Krakowie, Polska